






































Двухканальный драйвер двигателя TB6612FNG, 1A
Если в Ардуино-проекте требуется управлять биполярным шаговым двигателем или же двумя электромоторами на постоянном токе независимо друг от друга, то с такой задачей отлично справится небольшая плата драйвера моторов.
Данную плату на базе TB6612FNG можно запитать от напряжения 4.5 – 13.5 В, а напряжение логики лежит в диапазоне 2.7 – 5.5 В постоянного напряжения.
Нагрузочный ток отдельно взятого каждого канала равен 1 А.
Если необходимо подавать больший ток, следует добавить охлаждение.
Максимальное значение тока, подаваемого на канал, равно 3 А.
Питающие и управляющие контакты выполнены на разных сторонах платы, но управляющие вводы подтянуты к земле.
На мотор выделены два канала, способные изменять скорость и направление вращения.
На них приходит широтно-модулирующий сигнал, ограниченный 100 кГц.
Когда на контакт приходит сигнал высокого уровня, драйвер приводит в работу мотор.
Стоит помнить, что от переполюсовки защищены только моторы, а не модуль питания.
- Напряжение моторов (VMOT): 4,5 - 13,5 В
- Напряжение логики (VCC): 2,7 - 5,5 В
- Выходной максимальный ток: 3 А на каждый канал
- Выходной непрерывный ток: 1 А на каждый канал (2 канала могут быть соединены параллельно для получения 1 канала 2 А)
- Максимальная частота ШИМ: 100 кГц
- Встроенная тепловая защита
- Фильтрующие конденсаторы на обеих линиях питания
- Схема защиты от переполюсовки
Драйвер совместим с любыми микроконтроллерами, включая Arduino.
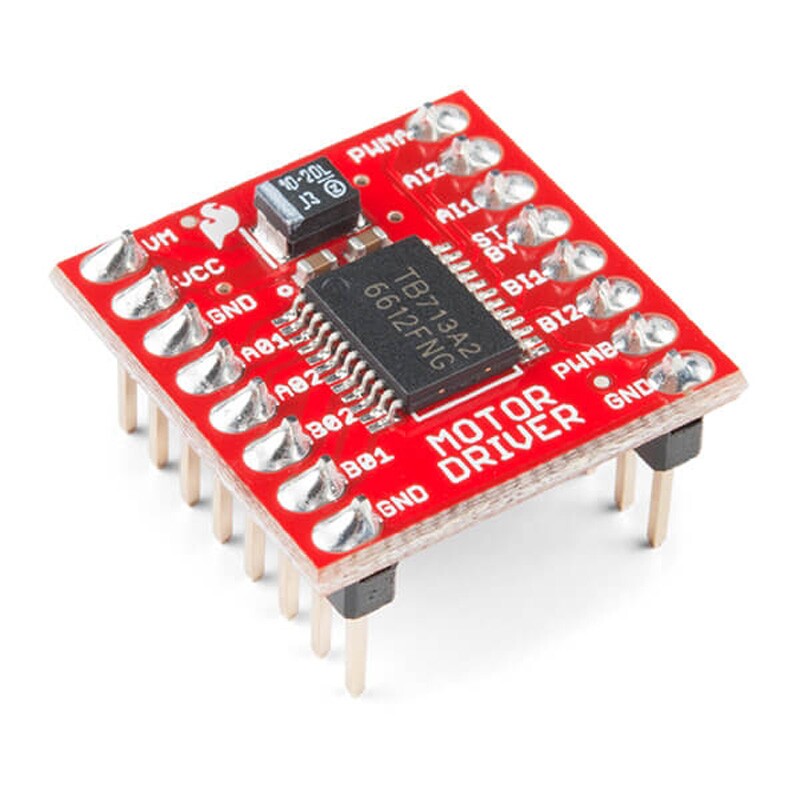
Подключается к цифровым выходам платы через контакты AIN1, AIN2, STBY, BIN1, BIN2, контакты PWMA и PWMB к ШИМ-выходам на плате. Контакты A01, A02, B01, B02 подключаются к управляемым двигателям. Для работы достаточно стандартных библиотек Arduino IDE.
• PWMA \ PWMB — Вход для управления скоростью вращения мотора, для канала A и B соответственно, подключается на выход arduino с поддержкой ШИМ (PWM).
• AIN1 \ AIN2 — Входы полумостов канала A, подключаются на любые свободные выходы arduino.
• BIN1 \ BIN2 — Входы полумостов канала B.
• A01 \ A02 — Выходы полумостов канала A, подключается коллекторный двигатель.
• B01 \ B02 — Выходы полумостов канала B.
• STBY — Включение микросхемы, подключаются на любой свободный выход arduino.
• VM — Вход питания силовой части микросхемы, питание двигателей.
• VCC — Вход питания логической части микросхемы.
• GND — Масса.
Все входы управления (PWMA(B), A(B)IN1(2), STBY) притянуты к массе резистором на 200к
- Артикул:
- 184027