


































ARDUINO Драйвер шагового двигателя TMC2130 V1.1
Драйвер шагового двигателя TMC2130 используется для управления биполярными (2-х фазными) шаговыми двигателями.
Максимальный ток на фазу подключенного двигателя составляет от 1,2 А (без радиатора) до 2 А (с радиатором).
TMC2130 может работать в режиме полного шага или микрошага 1/2, 1/4, 1/8, 1/16. Можно увеличить значение микрошага до 1/256 за счет интерполяции.
Для использования драйвера TMC2130 нужно подключить его к контроллеру, подключить питание и подходящий шаговый двигатель.
Драйвер TMC2130 может управляться или перемычками на плате или через интерфейс SPI.
По умолчанию включено управление перемычками.
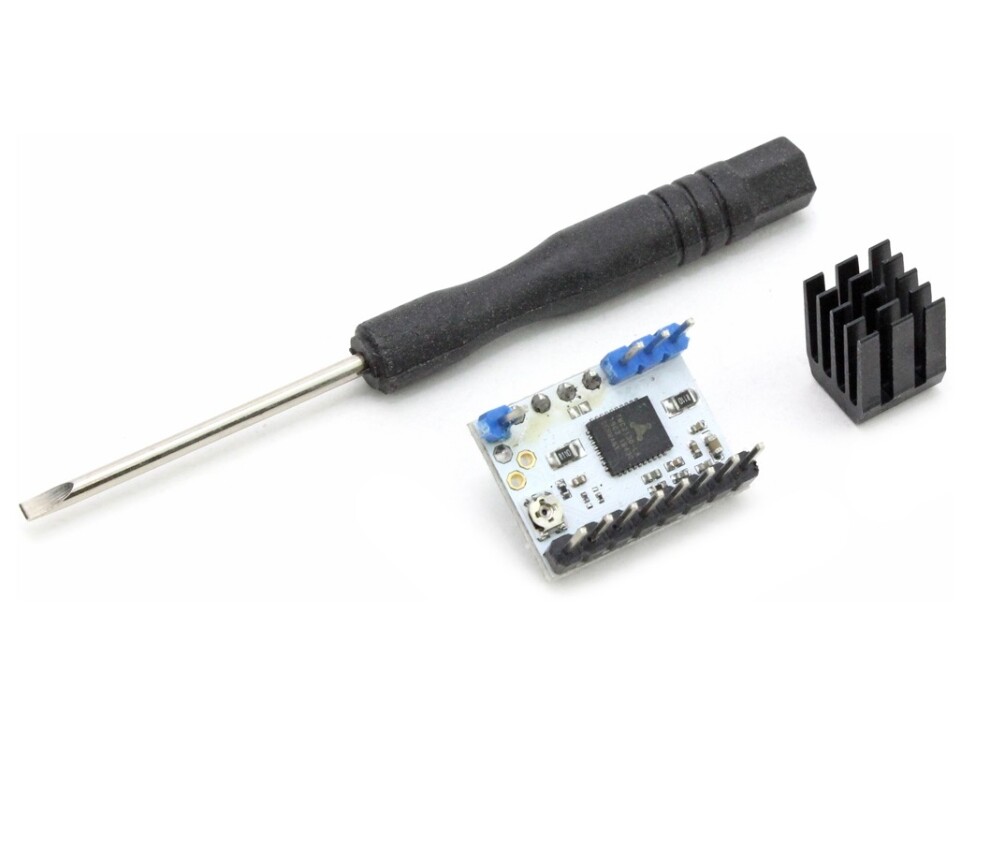
Комплектация:
1 × Драйвер шагового двигателя TMC2130
1 × Радиатор охлаждения
1 х отвертка
Напряжение логики 3 – 5 В (VDD, GND)
Напряжение для двигателей 5 – 46В (VMOT, GND)
Рабочий выходной ток 1,2 А, до 2 А (с радиатором)
Значение микрошага: 1/2, 1/4, 1/8, 1/16;
Значение микрошага с интерполяцией: до 1/256;
Режим microPlyer: 1/256
размеры: 20 х 15 х 10 мм;
Конфигурация: CFG, SPI
Ток обмоток шагового двигателя (А): 1.2-RMS, 2.5-пиковое
GND и VIO – питание логики
M1B, M1A, M2A, M2B – управление фазами двигателя
GND и VM – питание двигателя
DIR – управление направлением вращения двигателя
STER – управление микрошагом
EN – сигнал включения/выключения драйвера
SDO, CS, SCK, SDI – интерфейс SPI для конфигурации драйвера
stealthChop — для бесшумной работы и плавного движения. Чрезвычайно плавное движение является полезным для многих приложений.
spreadCycle — предлагает плавную работу и большую энергетическую эффективность в широком диапазоне скоростей и нагрузок, то есть очень быстрая реакция на изменение скорости и нагрузки двигателя
coolStep — регулирует ток, выдаваемый на двигатель в зависимости от скорости нагрузки на валу (доступно только в SPI режиме);
stallGuard2 — технология определения нагрузки на валу, позволяет останавливать двигатель при превышении нагрузки на вал и не использовать традиционные концевые выключатели (sensorless mode).
- Артикул:
- 217716