





































ARDUINO Датчик скорости - оптопара с энкодером
Модуль считывания угловых скоростей используется для считывания числа оборотов двигателя робота.
Обычно это необходимо знать при движения робота по заданной программе.
Например: роботу нужно проехать 2 метра и повернуть налево, считаем что у робота 2 одинаковых колеса с 3-ей шаровой опорой как у тележки Lego и они равны диаметру D = 5 см. Вычисляем длину окружности колеса = P x D = 3,14 х 5 = 15,7 см; Вычисляем сколько оборотов должны сделать двигатели робота чтобы он проехал 2 метра = 200 : 15,7 = 12,7 оборотов. Включаем в программе двигатели, а по энкодеру в программе определяем сколько двигатели сделали оборотов, как только их станет 12,7 то двигатели отключаем и для поворота в зависимости от угла и направления поворота подсчитываем количество оборотов одного из колес робота.
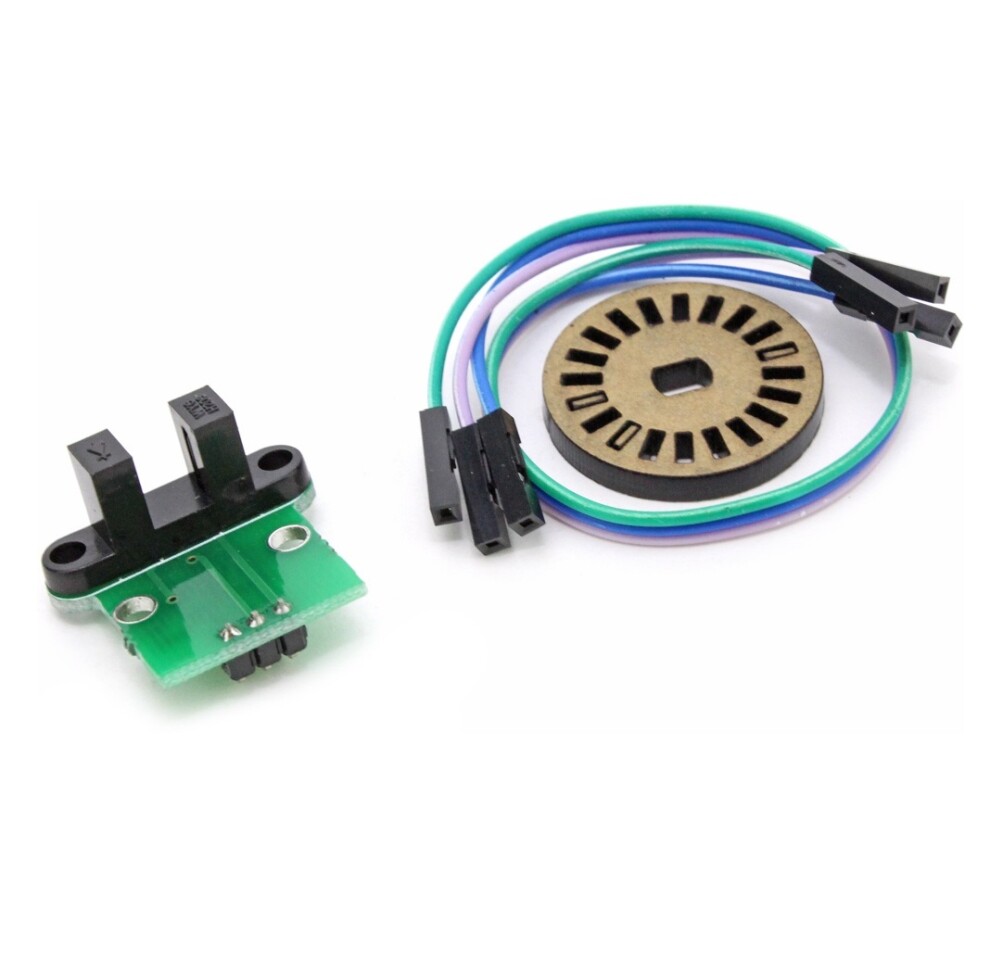
FC-03 модуль считывания угловых скоростей называют ещё датчиком оборотов или энкодером. Название происходит от принципа работы датчика. это небольшая печатная плата с установленными на ней микросхемой LM393, а также несколькими другими электронными компонентами.
Используется энкодер для определения скорости двигателя, подсчета импульсов.
Датчик оборотов FC-03 снабжен специальным штырьковым разъемом (типа«папа»)для подключения к плате микроконтроллера Arduino, AVR, ARM или д.р.
Модуль считывания угловых скоростей, созданный на основе двойного компаратора LM393 и щелевого датчика предназначен для совместного использования со специальными дисками, которые одеваются на вал редуктора или электродвигателя.
Таким образом, микроконтроллер получает информацию непосредственно от энкодера о количестве оборотов, проделанных двигателем, и так определяется его скорость.
Диски одеваются на вал редуктора или электродвигателя, чтобы микроконтроллер получал информацию непосредственно от энкодера о количестве оборотов проделанных двигателем.
- Артикул:
- 199372